Swarm CBS Planning
This is a final project for the course 16-782 Planning and Decision-making in Robotics. We were simulating the formation change of a drone swarm. We used conflict-based search to plan the motion of the swarm, and the base planner is RRT with motion primitives to simulate the drone dynamics.
There are two formations in this demo. If an obstacle blocks the target formation, the drone will try to reach the closest free space to form the formation. The formation moves faster than the drone, so u will see the drone chasing the goal. But once settled, the drone can reach the designated formation.
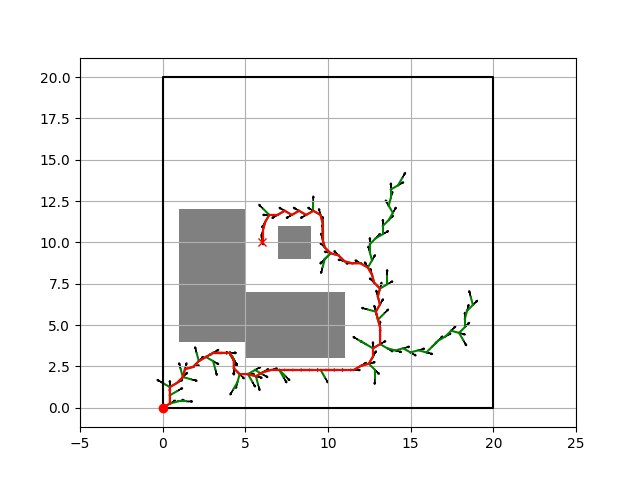
Below is one example of the solution from conflict-based search (CBS). Initially, the red drone and the orange drone conlicts. CBS imposed constraints on both drones so the conflict is resolved.
Before
After